分類
書籍資訊
書號:AB12501
作者:梅克2工作室
ISBN:9789865235642
初版日期:2022-11-18
最新出版日期:2024-11-12
出版商:台科大圖書
建議售價: NT$490
哪裡買 前版本書號:AB125特色
1.IPOE-A1輪型機器人採用開放原始碼軟硬體平臺的Arduino,學習資源豐富,I/O擴充容易,適合初學試探及進階應用。2.本書專為IPOE-A1打造,由淺而深,從基礎的LED、按鈕開關、蜂鳴器開始,接著進入繪圖型LCD控制、IR感測器、Encoder讀取,以及馬達控制,應用函式庫簡化設計內容,同時也加入智能控制部分,例如簡易循跡、PID循跡、遙控車、追隨車,還有包括IRA初級及中級機器人認證介紹,內容紮實。
3.本書加入藍牙模組,並應用在各實驗的參數調校及遙控上,例如PID參數、轉彎數據等,為程式除錯及參數調整提供一個利器。
4.範例式的引導操作,專題式的內容導向,輕鬆學習,每個練習均提供延伸推廣,激發讀者思考。
5.MOSME行動學習一點通功能:
登錄本書MOSME行動學習一點通後可獲得金元寶,金元寶可在IPOE會員中心透過「兌換科幣」,將金元寶兌換成「科幣」。科幣可至「歷屆試題及名師分享」測驗使用。使用「MOSME行動學習一點通」,登入會員與序號後,可我我練習,增加題目熟練度。
學科:使用「數位閱讀電子書模式」,可隨時隨地於行動裝置閱讀學習。
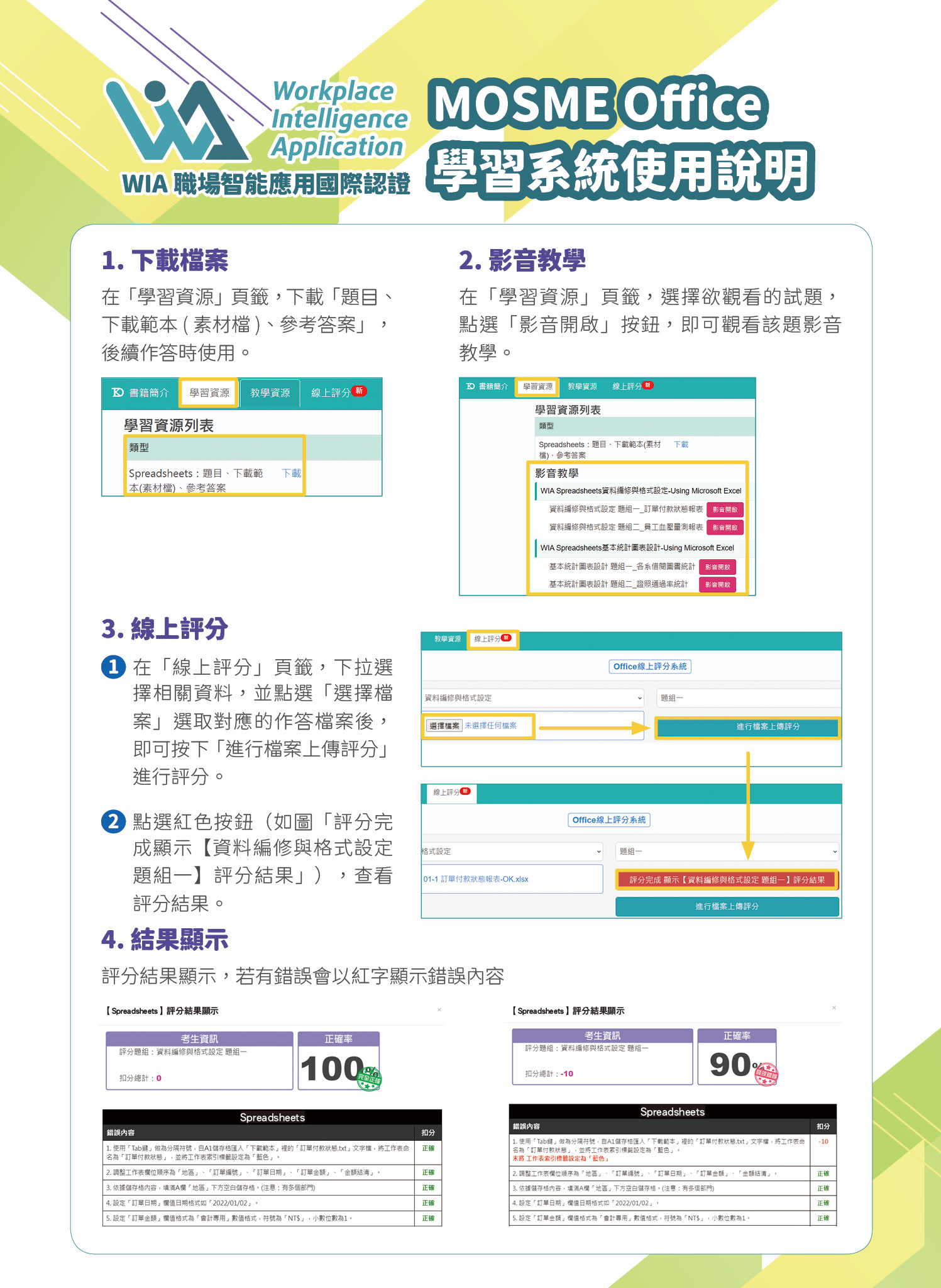
影音:於學習資源「影音教學」專區,可觀看本書教學影片。
評量:結合IRA初級與中級智慧型機器人應用認證,提升考取認證的實力。
加值:本書範例程式檔案可於學習資源專區下載使用。
目錄
如何使用本書壹.理論篇
第1章 微控制器與Arduino簡介
1-1 淺談微控制器(單晶片微電腦)
1-2 類比與數位訊號介面
1-3 Arduino簡介
1-4 Arduino系列控制板介紹
第2章 IPOE-A1簡介與開發環境安裝
2-1 概述
2-2 外觀及元件配置
2-3 腳位配置與電路圖
2-4 安全警告及注意事項
2-5 整合開發環境Arduino IDE
貳.智能小車學習篇
第3章 基本輸出控制
3-1 LED閃滅控制
3-2 透過電腦端的Serial Monitor控制閃爍時間
3-3 紅綠燈的控制
3-4 製作呼吸燈
第4章 輸入控制(開關)
4-1 按鍵值讀取(處理開關彈跳問題)
4-2 使用millis()函式解決彈跳問題
4-3 使用按鈕開關函式庫的LED控制
第5章 蜂鳴器
5-1 透過Serial Monitor發送的音符
5-2 音樂盒
第6章 LCD顯示控制
6-1 繪圖型LCD簡介Say Hello
6-2 顯示電池電壓
6-3 光敏電阻亮度偵測與LCD背光控制
6-4 繪製光敏電阻感測曲線圖
6-5 顯示LOGO圖片&動畫
第7章 紅外線循跡感測器
7-1 紅外線感測器的讀取與顯示
7-2 感測值的正規化
7-3 使用函式庫的感測值正規化與加權平均值計算
7-4 LCD顯示所有車身位置感測值
7-5 儲存IR校正值至EEPROM
第8章 直流馬達
8-1 轉速與正反轉控制
8-2 簡易循跡車
8-3 循跡車+任務(IRA 初級智慧型機器人應用認證)
第9章 藍牙模組與藍牙適配器(無線傳輸)
9-1 藍牙裝置的選用與設定
9-2 無線串列埠監控Serial Monitor─手機版
9-3 電子琴─手機版
9-4 手機藍牙遙控車
第10章 旋轉編碼器的使用
10-1 旋轉編碼器的RPM 轉速測量─使用外部中斷
10-2 旋轉編碼器輸出波形繪製
10-3 使用計時中斷的轉速測量
參.專題競賽篇
第11章 Visual BASIC與iPOE-A1共舞
11-1 Visual Studio 2012 Express簡介
11-2 牛刀小試─VB控制馬達啟動/停止範例
11-3 VB 捲軸控制馬達速度的範例
11-4 三軸加速度感測器的量測
11-5 距離感測&圖形繪製
第12章 PID 與Follow Me追隨車定位控制
12-1 PID簡介
12-2 Follow Me追隨車定位控制
12-3 PID 函式庫
第13章 PID循跡車與IRA認證
13-1 繞8路徑
13-2 方形路徑
13-3 IRA中級智慧型機器人應用認證
附錄
A.燒錄出廠程式(燒錄HEX 檔的方法)
B.本書材料表
初級、中級 IRA 智慧型機器人應用認證學科解析
初級IRA 智慧型機器人應用認證術科測試試題
中級IRA 智慧型機器人應用認證術科測試試題
學習資源列表
| 類型 | |
|---|---|
| 資源檔案 | 電腦下載 |
| 電子書試閱 |
影音教學
{{customurls[index].name}}
{{subitem.name}}
本書題目為 實作、問答、填充 等題型,須由教師命題測驗,提供學生進行診斷
GTC中英文看打輸入學習系統
線上看打學習系統試用版
您尚未登錄書籍序號,請完成序號登錄,取得完整版線上學習功能!
注意:試用版僅提供【101】學習單元,練習時間1分鐘。
注意:試用版僅提供【101】學習單元,練習時間1分鐘。
※ 認識Typing
*每回輸入一篇文章。
*錯誤率5%(含)以上,以0分計算。
*僅練習時間10分鐘會顯示近期成果曲線圖。
*系統成績計算規則:
中文看打輸入-
1.輸入正確一字,得一分。每列錯字、漏字、多打的字,倒扣0.5分。
2.測驗結束後的總正確輸入字扣除倒扣分數後與測驗時間數(以分鐘為單位)的比值,即為成績。
3.錯誤率=錯誤字數除以總字數,錯誤率5%(含)以上,以0分計算。
英文看打輸入-
1.誤打、多打、重打、漏打或與試卷上之原稿有任何不符之處,概視為錯誤一次計算(一字最多只計一次錯誤),標點和空格均視為前一字的一部分。
2.罰則:每錯誤一次扣總擊數五十擊。
3.成績計算:(總擊數—錯字*50)∕ 5 ∕ 時間=每分鐘淨打字數。
未列舉者,悉以認證測驗軟體之處理方式為準。
學習信用考試碼使用規範
學習信用考試碼:{{creditCode}}
(所有小考與擬真測驗皆通過,才會顯示「學習信用考試碼」)很可惜,您未通過「學習信用考試」,請進行補測
恭喜!您已通過國際認證考試!欲查詢成績與下載證書,請至PSC專業認證平臺(https://psc.ipoe.cc/)。
學習信用考試碼使用規範
學習信用考試碼使用規範
很可惜,您未通過「學習信用考試」